-

-
DRONE SWARM BASED ON CELLULAR AUTOMATA AND BIOLOGICAL INDICATORS IN THE DETECTION OF DISEASE VECTORS
In view of the following research problem: Is it possible to indentify and map disease vectors breeding places through smart autonomous agents? And besides the mapping and indentification, is it possible to identify if the vectors are infected or have a higher probability of infect the environment where they are? Can all this be done in real time? The use of a drone swarm as a malacological study and ecological analysis was proposed.

The UAVs, popularly known as drones, are vehicles wich can arrive in inhospitable places that would be hard to be analyzed by the agents in potencial transmission vectors hotspots. Equipped with environmental sensors, biosensors and cameras, UAVs are able to identify an area where they are flying over and can do a detailed analysis of a particular region, being able to identify the existence of aquatic ecosystems, where there is a greater possibility of survival of Biomphalaria and even identify the mollusc. After identifying the mollusc, it's possible to collect a water sample for analysis of biological indicators of possible contagion of the disease in question.
Because of that an algorithm for snail recognition was implemented to locate these disease transmitting vectors, especially the host of schistosoma mansoni, the Biomphalaria. The implementation is bases on a machine learning technique called AdaBoost (Adaptive Boosting) wich is quite used for classify objects into images.
The AdaBoost is a set of classifiers wich are built one after the other and their training objects are andomly sampled, initially with uniform distribution and later with distribution proportional to your difficulty of classification. For the application, it was trained with a set of 381 positive images and 620 negative images, with an acceptance rate of 95% and 50% of false positive.
.png)
.png)
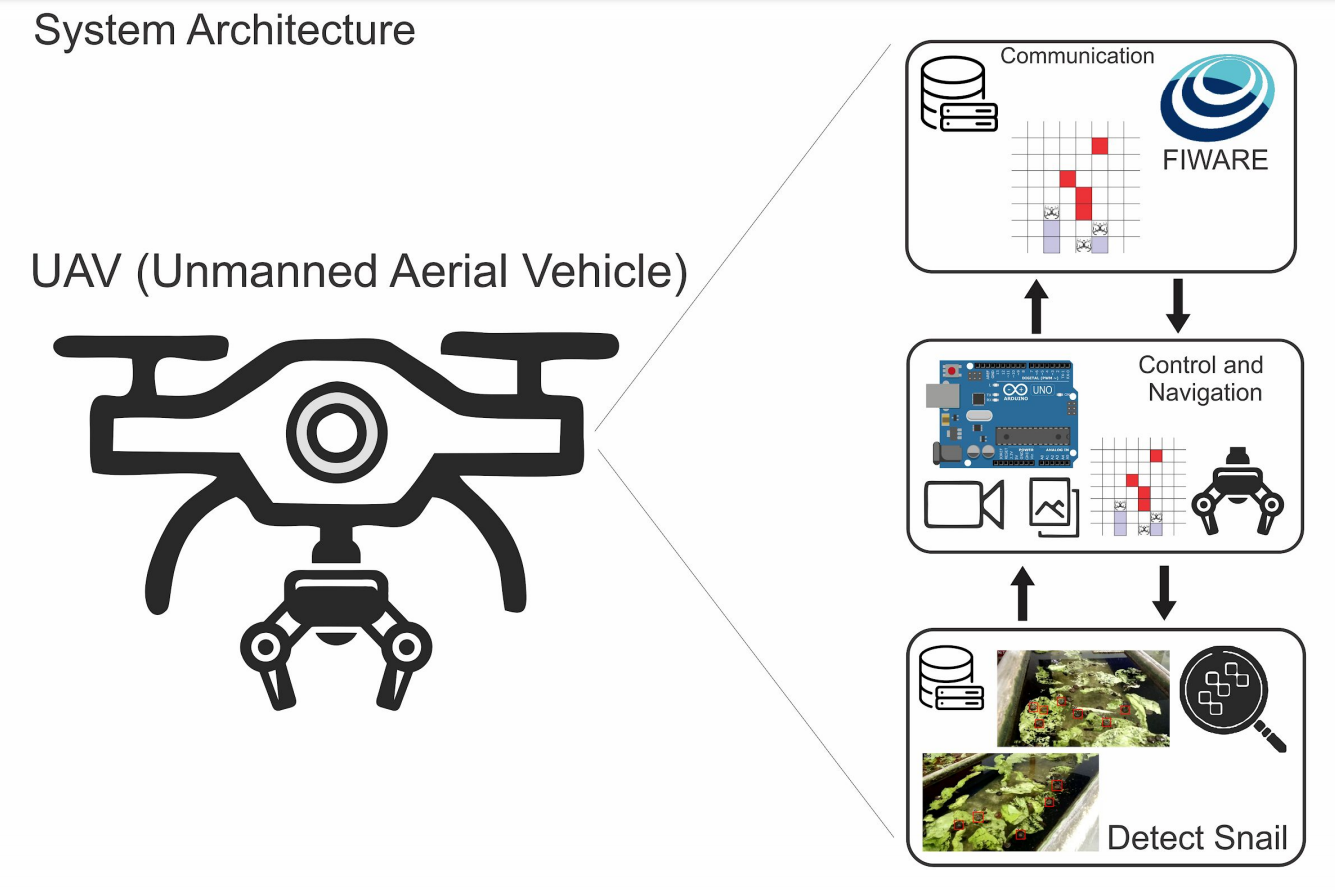
In addition, the following system architecture was proposed: